


Bluetooth Robot Car Controller
توضیحات Bluetooth Robot Car Controller
Tilt your smartphone to control your own Robot. Here is a simple project to control your Robot/Robo Car using Bluetooth Module HC-05 & 89c2051 Microcontroller with your Android Smartphone device. In this project the accelerometer of your android Smartphone is used to detect the tilt movement angle of Smartphone, just tilt your mobile Forward, Backward, Left and Right to control the direction of Robot.
You can download Circuit & HEX File here http://www.hobbyprojects.com/bluetooth-device-control/
App Instructions:
1. First make sure your HC-05 Bluetooth Module is paired with your mobile. The default password for pairing is "1234" or "0000". Check the manual of Bluetooth module.
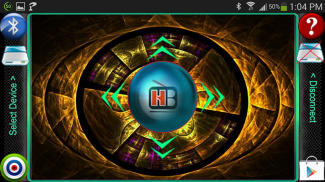
2. Click on "SELECT DEVICE" icon to select paired Bluetooth module.
3. When you tilt mobile "FORWARD" it sends the data "A" to Bluetooth Module connected with the circuit. When Microcontroller detects "A" the Robot / Robot Car moves FORWARD.
4. When you tilt mobile "BACKWARD" it sends the data "B" to Bluetooth Module connected with the circuit. When Microcontroller detects "B" the Robot / Robot Car moves REVERSE.
5. When you tilt mobile "LEFT" it sends the data "C" to Bluetooth Module connected with the circuit. When Microcontroller detects "C" the Robot / Robot Car turns LEFT.
6. When you tilt mobile "RIGHT" it sends the data "D" to Bluetooth Module connected with the circuit. When Microcontroller detects "D" the Robot / Robot Car turns RIGHT.
7. When the mobile phone is not tilted in any direction (screen upward position), it sends the data "E" to Bluetooth Module connected with the circuit. When Microcontroller detects "E" the Robot / Robot Car gets STOPPED. You can also stop the robot by pressing STOP button which is in the center of remote.
شیب گوشی های هوشمند خود را به کنترل ربات خود را. در اینجا یک پروژه ساده را به کنترل خود ربات / فونز اتومبیل با استفاده از بلوتوث ماژول HC-05 و 89c2051 میکروکنترلر با دستگاه آندروید گوشی های هوشمند خود است. در این پروژه از شتاب سنج از آندروید گوشی های هوشمند خود است مورد استفاده برای شناسایی زاویه حرکت شیب گوشی های هوشمند، فقط شیب تلفن همراه خود را به جلو، عقب، چپ و راست به کنترل جهت ربات.
شما می توانید مدار و HEX فایل اینجا http://www.hobbyprojects.com/bluetooth-device-control/ دانلود
دستورالعمل های برنامه:
1. اول مطمئن شوید HC-05 خود را ماژول بلوتوث با تلفن همراه خود را جفت می شود. رمز عبور پیش فرض برای جفت شدن "1234" و یا "0000" است. کتابچه راهنمای ماژول بلوتوث را بررسی کنید.
2. با کلیک بر روی "دستگاه" آیکون برای انتخاب زوج ماژول بلوتوث.
3. هنگامی که شما شیب همراه "به جلو" آن را می فرستد داده "A" به ماژول بلوتوث متصل با مدار. هنگامی که میکروکنترلر تشخیص "A" ربات / ربات ماشین به جلو حرکت می کند.
4. هنگامی که شما شیب همراه "عقب مانده" آن را داده "B" را به ماژول بلوتوث متصل با مدار می فرستد. هنگامی که میکروکنترلر تشخیص "B" ربات / ربات اتومبیل حرکت می کند معکوس.
5. هنگامی که شما همراه "چپ" شیب آن می فرستد داده "C" را به ماژول بلوتوث متصل با مدار. هنگامی که میکروکنترلر تشخیص "C" ربات / ربات ماشین تبدیل چپ.
6. هنگامی که شما شیب همراه "حق" آن را داده "D" را به ماژول بلوتوث متصل با مدار می فرستد. هنگامی که میکروکنترلر تشخیص "D" ربات / ربات اتومبیل چرخش راست.
7. هنگامی که تلفن همراه است در هر جهت (صفحه نمایش موقعیت به سمت بالا) کج نیست، آن را می فرستد داده "E" به ماژول بلوتوث متصل با مدار. هنگامی که میکروکنترلر تشخیص "E" ربات / ربات ماشین متوقف می شود. شما همچنین می توانید ربات با فشار دادن دکمه STOP است که در مرکز از راه دور را متوقف کند.
Bluetooth Robot Car Controller - نسخه 1.0
(07-12-2018)Bluetooth Robot Car Controller - اطلاعات APK
نسخه APK: 1.0حزمة: appinventor.ai_hobbyprojects_com.BluetoothRoboControllerآخرین نسخه Bluetooth Robot Car Controller










 4.34
4.34


اپلیکیشنها در دسته مشابه









